library(spdep) # Untuk pemodelan dependensi spasial
library(spatialreg) # Untuk pemodelan dependensi spasial
library(stats) # Untuk operasi matematis
library(car) # Untuk menghitung VIF
library(nortest) # Untuk uji kenormalan
library(sf) # Untuk menginput peta
library(ggplot2) # Untuk visualisasi data
library(tidyr) # Untuk mengolah dataframe
library(dplyr) # Untuk mengolah dataframe
library(tidyverse) # Struktur matriks
library(lmtest) # Uji model linier
library(spmoran) # ESF
library(ape)
library(fitdistrplus)
library(readxl)a. Model Dependensi Spasial
Deskripsi
Analisis regresi spasial digunakan untuk melakukan pemodelan hubungan antara peubah respon dan prediktor dalam bentuk model regresi dengan mempertimbangkan efek spasial. Efek spasial antar lokasi dapat disebabkan oleh dependensi spasial dan heterogenitas spasial (Anselin, 1988). Dependensi spasial adalah ketergantungan antara suatu lokasi dengan lokasi di sekitarnya sedangkan heterogenitas spasial adalah perbedaan pengaruh peubah prediktor terhadap respon di lokasi yang diamati. Eigenvector Spasial Filtering (ESF) adalah metode untuk mengatasi masalah dependensi spasial dengan menambahkan kombinasi linier dari vektor ciri matriks pembobot spasial pada spesifikasi model regresi (Chun & Griffith, 2014). Eigenvector Spasial Filtering (ESF) dapat mengurangi kesalahan spesifikasi spasial, meningkatkan kesesuaian model, serta kenormalan dan homogenitas ragam sisaan. Metode lain yang dapat mengatasi masalah dependensi spasial adalah Random Effect Eigenvector Spatial Filtering (RE-ESF).
Murakami & Griffith (2015) memperluas Eigenvector Spatial Filtering (ESF) yang merupakan pendekatan efek tetap, ke pendekatan efek acak yaitu Random Effect Eigenvector Spatial Filtering (RE-ESF). Random Effect Eigenvector Spatial Filtering (RE-ESF) mempertimbangkan efek spasial sebagai variabel acak yang bervariasi di antara wilayah-wilayah yang diamati. Hughes & Haran (2013) membahas kegunaan Random Effect Eigenvector Spatial Filtering (RE-ESF) untuk analisis dependensi spasial yang meminimumkan nilai ragam yang disebabkan oleh faktor acak antara peubah prediktor dan proses spasial laten.
Eigenvector Spatial Filtering (ESF) yang juga disebut koordinat utama matriks ketetanggaan (Dray et al., 2006) atau pemetaan vektor ciri Moran didasarkan pada koefisien Moran (MC). Koefisien Moran untuk vektor peubah acak \(y\) didefinisikan sebagai berikut:
\[ MC[y] = \frac{n}{(1' W1)} \left( y' MWMy \right) / \left( y' My \right) \tag{1}\]
dengan \(W\) adalah matriks bobot spasial simetris berukuran \(n \times n\) dengan diagonal nol, dan \(M = (I-11'/n)\) adalah matriks pemusatan. Misalkan dekomposisi eigen matriks \(MWM\) sebagai \(E^* \Lambda^* E^{*'}\), dengan \(E^* = [e_1, \ldots, e_n]\) adalah matriks vektor ciri. \(\Lambda^* = \text{diag}(\lambda_1, \ldots, \lambda_n)\) adalah matriks diagonal yang elemennya adalah akar ciri \(\{\lambda_1, \ldots, \lambda_N\}\). Nilai koefisien Moran untuk hasil vektor ciri ke-\(l\) adalah:
\[ MC[e_l] = \frac{n}{(1' W1)} \left( e_l' MWMye_l \right) / \left( e_l' Me_l \right) = \frac{n}{(1' W1)} \left( e_l' E^* \Lambda^* E^{*'} y e_l \right) / \left( e_l' Me_l \right) = \frac{n}{(1' W1)} \lambda_l \tag{2}\]
Fixed Effect Eigenvector Spatial Filtering (ESF)
Kombinasi linier dari akar ciri masih dapat diinterpretasikan dalam istilah MC. Misalkan \(E = [e_1, \ldots, e_L]\) adalah matriks yang terdiri dari vektor ciri \(L (< n)\) di \(E^*\), dan \(\gamma = [\gamma_1, \ldots, \gamma_L]'\) adalah vektor parameter. Model dasar dari ESF adalah:
\[ y = X\beta + E\gamma + \varepsilon, \quad \varepsilon \sim N(0, \sigma^2 I) \tag{3}\]
dengan \(y\) adalah vektor peubah respon berukuran \(n \times 1\), \(E\) adalah matriks berukuran \(n \times L\) yang terdiri dari subset \(L\) (\(L < n\)) vektor ciri dari \(E^*\), \(\varepsilon\) adalah vektor galat berukuran \(n \times 1\), \(\beta\) adalah vektor parameter berukuran \(K \times 1\), \(\gamma = [\gamma_1, \ldots, \gamma_l, \ldots, \gamma_L]'\) adalah vektor parameter berukuran \(L \times 1\), \(\sigma^2\) adalah parameter ragam, dan \(0\) adalah vektor nol berukuran \(n \times 1\).
Pemilihan \(L\) vektor ciri pada \(E\) yang signifikan dilakukan menggunakan metode regresi bertatar. Persamaan 3 identik dengan model regresi linier standar, sehingga linier standar, pemilihan vektor ciri yang signifikan dapat dilakukan dengan metode pemilihan bertatar dengan menggunakan metode kuadrat terkecil. Penduga parameter \(\beta\) dan \(\gamma\) sebagai berikut:
\[ \begin{bmatrix} \hat{\beta} \\ \hat{\gamma} \end{bmatrix} = \left( X^T X \quad X^T E \quad E^T X \quad I \right)^{-1} \tag{4}\]
Random Effect Eigenvector Spatial Filtering (RE-ESF)
Berdasarkan Hughes & Haran (2013), model linier RE-ESF yang didasarkan pada model dengan autoregresif prior bersyarat intrinsik dirumuskan sebagai berikut:
\[ y = X\beta + E\gamma + \varepsilon, \quad \gamma \sim N(0, \sigma_{\gamma}^2 \Lambda), \quad \varepsilon \sim N(0, \sigma^2 I) \tag{5}\]
dengan \(\sigma_{\gamma}^2\) adalah parameter ragam dan \(\Lambda\) adalah matriks diagonal berukuran \(L \times L\) yang elemennya adalah \(L\) pertama akar ciri dari \(MWM\), \(\gamma_1, \ldots, \gamma_L\), sesuai dengan \(L\) vektor ciri di \(E\). Persamaan di atas identik dengan model campuran linier (linear mixed model atau LMM). Model campuran linier merupakan perluasan dari model linear yaitu dengan menambahkan efek acak. Metode ini banyak digunakan dalam rancangan percobaan untuk data yang berkorelasi. Bentuk umum model linear campuran adalah
\[ y = X\beta + Zu + \varepsilon \tag{6}\]
dengan \(X\) adalah matriks desain dari efek tetap yang teramati, \(\beta\) adalah vektor parameter pengaruh efek tetap yang tidak diketahui, \(Z\) adalah matriks desain efek acak yang teramati, \(u\) adalah vektor efek acak yang tidak diketahui, dan \(\varepsilon\) vektor galat acak yang tidak diketahui.
Hughes & Haran (2013) memperkenalkan vektor ciri ke dalam \(E\) yang akar cirinya lebih besar dari nol. Penduga linear tak bias terbaik (best linear unbiased estimator atau BLUE) dari \(\beta\) dan \(\gamma\) diperoleh sebagai berikut (Henderson, 1975),
\[ \begin{bmatrix} \hat{\beta} \\ \hat{\gamma} \end{bmatrix} = \left( X^T X \quad X^T E \quad E^T X \quad I + \frac{\sigma^2}{\sigma_{\gamma}^2} \Lambda^{-1} \right)^{-1} \begin{bmatrix} X^T y \\ E^T y \end{bmatrix} \tag{7}\]
dengan \(\Lambda^{-1}\) adalah matriks diagonal berukuran \(L \times L\) yang elemennya adalah \(1/\lambda_1, \ldots, 1/\lambda_L\). Pada Persamaan 7, diagonal ke-\(l\) (\(l = 1, \ldots, L\)) dari \((\sigma^2/(\sigma_{\gamma}^2)) \Lambda^{-1}\), yang diberikan oleh \((\sigma^2/(\sigma_{\gamma}^2)) \gamma_l^{-1}\), menyusutkan koefisien ke-\(l\) (\(\gamma_l\)) menuju nol. Penyusutan ini signifikan untuk vektor eigen yang berhubungan dengan akar ciri yang lebih kecil, \(\gamma_l\). Penyusutan seperti itu yang berguna untuk menduga model sambil mempertahankan derajat kebebasan yang konstan (Hodges, 2013), memungkinkan menduga model RE-ESF tanpa menerapkan pemilihan vektor ciri bertahap (stepwise eigenvector selection). Ragam dari pendugaan \(\beta\) dan \(\gamma\) diberikan sebagai berikut:
\[ \text{Var}[\hat{\beta}, \hat{\gamma}] = \sigma^2 \left( X^T X \quad X^T E \quad E^T X \quad I + \frac{\sigma^2}{\sigma_{\gamma}^2} \Lambda^{-1} \right)^{-1} \tag{8}\]
Penduga Parameter Model
Persamaan 7 dapat ditulis sebagai berikut:
\[ y = X\beta + EV(\theta)u + \varepsilon, \quad u \sim N(0, \sigma^2 I), \quad \varepsilon \sim N(0, \sigma^2 I) \tag{9}\]
dengan \(V(\theta)u = \gamma\) dengan \(\theta = \left\{ \left( \frac{\sigma_{\gamma}^2}{\sigma^2} \right), \alpha \right\}\), dan \(V(\theta)\) adalah matriks diagonal berukuran \(L \times L\) yang elemen ke-\((l, l)\) adalah \(\left( \frac{\sigma_{\gamma}}{\sigma} \right) \lambda_l \sqrt{\alpha}\). Berdasarkan Bates & M. (2010), Persamaan 10 identik dengan model linear campuran yang pendugaannya menggunakan metode kemungkinan maksimum (maximum likelihood atau ML) dan kemungkinan maksimum terbatas (restricted maximum likelihood atau REML). Loglikelihood pada Persamaan 11 dapat dituliskan sebagai berikut:
\[ \text{log} L(\beta, \theta, \sigma^2) = -\frac{n}{2} \text{log}(2\pi\sigma^2) - \text{log}(|V(\theta)|^2) - \frac{d(\theta)}{\sigma^2} \tag{10}\]
\[ d(\theta) = \lVert y - X\beta + EV(\theta)u \rVert^2 + \lVert u \rVert^2 \tag{11}\]
Penduga linear tak bias terbaik dari \(\beta\) dan \(u\) diperoleh dengan memaksimumkan Persamaan 12 sebagai berikut:
\[ \begin{bmatrix} \hat{\beta} \\ \hat{u} \end{bmatrix} = \left( X^T X \quad X^T EV(\theta) \quad V(\theta)E^T X \quad V(\theta)^2 + I \right)^{-1} \begin{bmatrix} X^T y \\ V(\theta)E^T y \end{bmatrix} \tag{12}\]
dengan \(V(\theta)^2\) adalah matriks diagonal berukuran \(L \times L\) yang elemen ke-\((l, l)\) adalah \(\left( \frac{\sigma_{\gamma}^2}{\sigma^2} \right) \gamma_l \alpha\). Persamaan 11 identik dengan Persamaan 7 dengan penambahan \(\alpha\). \(\theta\) dapat diduga dengan memaksimumkan Persamaan 10. Penduga kemungkinan maksimum dari parameter ragam (\(\theta\) dan \(\sigma^2\)) diketahui berbias (Bates & M., 2010). Oleh karena itu, digunakan pendugaan REML yang memberikan pendugaan parameter ragam yang tidak bias. Residual log-likehood untuk parameter ragam diformulasikan sebagai berikut:
\[ \text{log} L_R(\theta, \sigma^2) = \int \text{log} L(\beta, \theta, \sigma^2) d\beta \tag{13}\]
Dengan memaksimumkan Persamaan 14, penduga tak bias diperoleh sebagai berikut:
\[ \sigma^2 = \frac{\lVert y - X\beta + EV(\theta)u \rVert^2}{(n-K)} \quad (13) \tag{14}\]
Berdasarkan Bates & M. (2010), \(\theta\) diduga dengan memaksimumkan profil residual log-likelihood, \(\text{log} L_R(\theta)\) yang diturunkan dengan langkah (a) mensubstitusikan Persamaan 10 pada Persamaan 12 dan menurunkan fungsi \(\text{log} L_R(\theta, \sigma^2)\) dan (b) mensubstitusikan Persamaan 13 pada \(\text{log} L_R(\theta, \sigma^2)\) dan menurunkan fungsi \(\text{log} L_R(\theta)\). Hasil fungsi profil residual log-likelihood diberikan sebagai berikut:
\[ \text{log} L_R(\theta) = -\frac{1}{2} \text{log} \left| \begin{bmatrix} X^T X & X^T EV(\theta) \\ V(\theta) E^T X & V(\theta)^2 + I \end{bmatrix} \right| - \frac{(n-K)}{2} \left( 1 + \text{log} \left( \frac{2\pi d(\theta)}{(n-K)} \right) \right) \tag{15}\]
Maksimalisasi Persamaan 16 membutuhkan penghitungan determinan pada suku pertama. Beban komputasi dapat diringankan dengan mengurangi jumlah vektor eigen di \(E\). Ragam dari \(\hat{\beta}\) dan \(\hat{\gamma}\) yang diduga adalah sebagai berikut:
\[ \text{Var}[\hat{\beta}\hat{u}] = \text{Var}[\hat{\beta}V(\theta)\hat{u}] = \sigma^2 \left(X'X \quad X'E \atop E'X \quad I + \frac{\sigma^2}{\sigma_{\gamma}^2}\Lambda^{-1} \right)^{-1} \quad \text{(15)} \tag{16}\]
dengan \(V(\theta)^{-2}\) adalah matriks diagonal berukuran \(L \times L\) yang elemen ke-\(l\) adalah \(\left(\frac{\sigma^2}{\sigma_{\gamma}^2}\right) \lambda_l(\alpha)^{-1}\).
Data
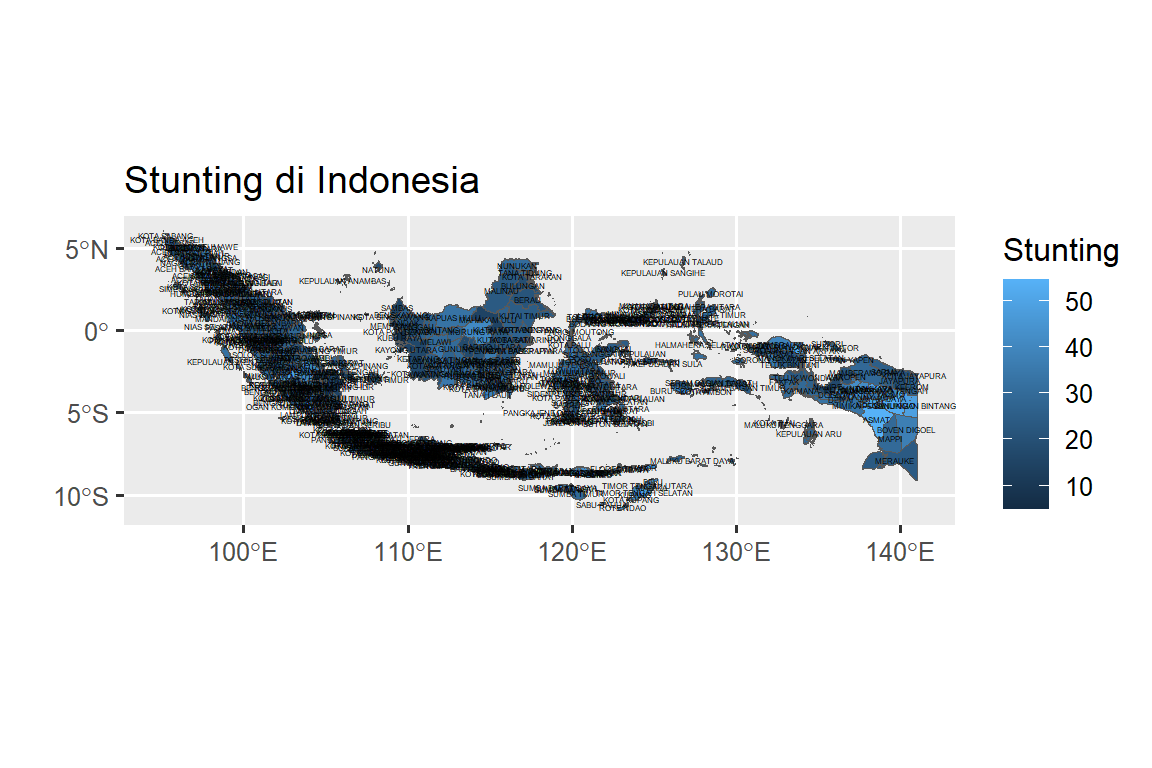
Data yang digunakan pada penelitian ini adalah data empiris Stunting per Kabupaten/Kota di Indonesia tahun 2021 dari Badan Pusat Statistika yang terdiri dari 513 Kabupaten/Kota. Data tersebut terdiri dari peubah respon dan peubah penjelas. Peubah-peubah tersebut dapat dilihat pada Tabel 1:
| Kode | Peubah |
|---|---|
| \(Y\) | Stunting |
| \(X_1\) | Tingkat Kemiskinan |
| \(X_2\) | Akses Layanan Kesehatan |
| \(X_3\) | Gizi Ibu Hamil |
| \(X_4\) | Akses Sanitasi |
| \(X_5\) | Akses Air Bersih |
Tahapan Analisis Data
Penelitian ini dilakukan dengan langkah-langkah sebagai berikut:
Melakukan analisis eksplorasi data pada data stunting di Indonesia tahun 2021 untuk melihat gambaran umum setiap peubah yang diamati.
Melakukan tahap pra-pemrosesan data dengan mengidentifikasi pencilan pada peubah respon dan menanganinya.
Memodelkan data stunting menggunakan metode Regresi Linier, memeriksa asumsinya, dan mengevaluasi model.
-
Memodelkan data stunting menggunakan metode Eigenvector Spatial Filtering (ESF), dengan rincian tahapan sebagai berikut:
- Menguji data stunting dengan indeks Moran dan Lagrange-Multiplier
- Menghitung bobot spasial menggunakan pendekatan matriks invers jarak dan eksponensial.
- Memodelkan data stunting menggunakan metode ESF efek tetap (fixed effects) untuk setiap unit spasial.
- Memodelkan data stunting menggunakan metode ESF efek acak (random effect) dengan asumsi peubah acak berasal dari sebaran normal.
- Memodelkan data stunting menggunakan metode ESF efek acak dengan pendekatan Varying Coefficient (Random Effect-ESF VC).
- Melakukan uji hipotesis untuk efek peubah penjelas terhadap peubah respon.
- Mengevaluasi model.
Membandingkan kinerja model Regresi Linier, Fixed Effect-ESF, Random Effect-ESF, dan Random Effect-ESF VC menggunakan nilai Koefisien Determinasi (R-Sqrd) dan Akaike Information Criterion (AIC).
Menguji kelayakan dari model terbaik.
Tahapan Analisis Data dengan R
Package
Data dan Peta
#Input Data
stunting <- read_excel("data/data_stunting_indo.xlsx")
#Import peta SHP
peta <- read_sf("data/shp/BATAS KABUPATEN KOTA DESEMBER 2019 DUKCAPIL.shp")Modifikasi Data
#Menggabungkan Data ke file SHP
#df = cbind(stunting,KAB_KOTA=shp.jabar$KAB_KOTA)
dfix = left_join(peta, stunting, by = "KAB_KOTA")
dfix = na.omit(dfix)
sf::sf_use_s2(FALSE)
#> Spherical geometry (s2) switched off
longlat = st_coordinates(st_centroid(dfix$geometry))
#> Warning in st_centroid.sfc(dfix$geometry): st_centroid does not
#> give correct centroids for longitude/latitude data
#library("writexl")
#write_xlsx(dfix,"datacek.xlsx")Plot Spasial
Bobot Spasial
Uji Asumsi
#Uji Moran Indeks (Autokorelasi)
moran.test(dfix$Y, wmoran)
#>
#> Moran I test under randomisation
#>
#> data: dfix$Y
#> weights: wmoran
#>
#> Moran I statistic standard deviate = 29, p-value <2e-16
#> alternative hypothesis: greater
#> sample estimates:
#> Moran I statistic Expectation Variance
#> 1.84e-01 -1.97e-03 4.06e-05
# Uji Breusch-Pagan (Heteroskesdasitas)
bptest(lm(Y ~ X1 + X2 + X3 + X4 + X5, data = dfix))
#>
#> studentized Breusch-Pagan test
#>
#> data: lm(Y ~ X1 + X2 + X3 + X4 + X5, data = dfix)
#> BP = 57, df = 63, p-value = 0.7
#LM Test (Model Spsial)
model <- lm(Y ~ X1 + X2 + X3 + X4 + X5, data = dfix)
LM <- lm.LMtests(model, wmoran, test = c('LMerr', 'LMlag', 'RLMerr', 'RLMlag'))
#> Please update scripts to use lm.RStests in place of lm.LMtests
summary(LM)
#> Rao's score (a.k.a Lagrange multiplier) diagnostics for
#> spatial dependence
#> data:
#> model: lm(formula = Y ~ X1 + X2 + X3 + X4 + X5, data = dfix)
#> test weights: listw
#>
#> statistic parameter p.value
#> RSerr 126.6 1 < 2e-16 ***
#> RSlag 119.4 1 < 2e-16 ***
#> adjRSerr 27.6 1 1.5e-07 ***
#> adjRSlag 20.4 1 6.2e-06 ***
#> ---
#> Signif. codes: 0 '***' 0.001 '**' 0.01 '*' 0.05 '.' 0.1 ' ' 1Fixed ESF
#ESF Fixed
Y = dfix$Y
X = matrix(c(dfix$X1, dfix$X2, dfix$X3, dfix$X4, dfix$X5), nrow(dfix), 5)
meig <- meigen(cmat = w)
#> 149 spatial eigen-pairs
esf <- esf(y = Y, x = X, meig = meig)
#> [1] 50
#> 76/149 eigenvectors are selected
esf
#> Call:
#> esf(y = Y, x = X, meig = meig)
#>
#> ----Coefficients------------------------------
#> Estimate SE t_value p_value
#> (Intercept) 3.16e+01 2.43e+00 12.976 1.08e-32
#> V1 2.78e-01 4.53e-02 6.132 1.97e-09
#> V2 2.36e-02 2.64e-02 0.896 3.71e-01
#> V3 7.36e-05 4.44e-05 1.658 9.80e-02
#> V4 -1.47e-01 2.06e-02 -7.119 4.65e-12
#> V5 3.50e-03 2.21e-02 0.158 8.74e-01
#>
#> ----Variance parameter (residuals)---------------
#> Estimate
#> SD 5.581
#> Moran.I/max(Moran.I) 0.114
#>
#> ----Error statistics--------------------------
#> stat
#> resid_SE 5.147
#> adjR2 0.648
#> logLik -1511.474
#> AIC 3188.948
#> BIC 3540.241Random Effect-ESF
#ESF Random
Y = dfix$Y
X = matrix(c(dfix$X1, dfix$X2, dfix$X3, dfix$X4, dfix$X5), nrow(dfix), 5)
meig <- meigen(cmat = w)
#> 149 spatial eigen-pairs
resf <- resf(y = Y, x = X, meig = meig)
resf
#> Call:
#> resf(y = Y, x = X, meig = meig)
#>
#> ----Coefficients------------------------------
#> Estimate SE t_value p_value
#> (Intercept) 3.43e+01 2.46e+00 13.963 0.00e+00
#> V1 3.35e-01 5.66e-02 5.914 6.85e-09
#> V2 7.94e-03 2.54e-02 0.312 7.55e-01
#> V3 5.75e-05 4.54e-05 1.267 2.06e-01
#> V4 -1.41e-01 2.07e-02 -6.787 3.82e-11
#> V5 -3.73e-02 2.23e-02 -1.675 9.47e-02
#>
#> ----Variance parameter------------------------
#>
#> Spatial effects (residuals):
#> (Intercept)
#> random SD: Spatial 2.581
#> Moran.I/max(Moran.I) 0.146
#>
#> ----Error statistics--------------------------
#> stat
#> resid SE 5.086
#> adjR2(cond) 0.653
#> rlogLik -1675.706
#> AIC 3369.412
#> BIC 3407.504
#>
#> NULL model: lm( y ~ x )
#> (r)loglik: -1711.8 ( AIC: 3437.6, BIC: 3467.227 )
#>
#> Note: AIC and BIC are based on the restricted/marginal likelihood.
#> Use method="ml" for comparison of models with different fixed effects (x)Random Effect ESF - VC
#ESF VC
Y = dfix$Y
X = matrix(c(dfix$X1, dfix$X2, dfix$X3, dfix$X4, dfix$X5), nrow(dfix), 5)
meig <- meigen(coords = longlat)
#> 64 spatial eigen-pairs
resf_vc <- resf_vc(y = Y,
x = X,
meig = meig,
x_sel = FALSE)
#> [1] "------- Iteration 1 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3591.401"
#> [1] "------- Iteration 2 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3455.855"
#> [1] "------- Iteration 3 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3452.081"
#> [1] "------- Iteration 4 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3451.932"
#> [1] "------- Iteration 5 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3451.901"
#> [1] "------- Iteration 6 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3451.895"
#> [1] "------- Iteration 7 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3451.894"
#> [1] "------- Iteration 8 -------"
#> [1] "1/6"
#> [1] "2/6"
#> [1] "3/6"
#> [1] "4/6"
#> [1] "5/6"
#> [1] "6/6"
#> [1] "BIC: 3451.894"resf_vc
#> Call:
#> resf_vc(y = Y, x = X, x_sel = FALSE, meig = meig)
#>
#> ----Spatially varying coefficients on x (summary)----
#>
#> Coefficient estimates:
#> (Intercept) V1 V2
#> Min. :34.1 Min. :-0.126 Min. :-0.0814
#> 1st Qu.:34.2 1st Qu.: 0.302 1st Qu.:-0.0166
#> Median :34.4 Median : 0.394 Median :-0.0023
#> Mean :34.4 Mean : 0.399 Mean :-0.0034
#> 3rd Qu.:34.5 3rd Qu.: 0.489 3rd Qu.: 0.0102
#> Max. :34.8 Max. : 0.793 Max. : 0.0634
#> V3 V4 V5
#> Min. :-4.97e-05 Min. :-0.188 Min. :-0.0463
#> 1st Qu.: 5.21e-05 1st Qu.:-0.163 1st Qu.:-0.0410
#> Median : 8.63e-05 Median :-0.152 Median :-0.0352
#> Mean : 7.74e-05 Mean :-0.152 Mean :-0.0336
#> 3rd Qu.: 1.02e-04 3rd Qu.:-0.137 3rd Qu.:-0.0259
#> Max. : 2.29e-04 Max. :-0.125 Max. :-0.0189
#>
#> Statistical significance (adjusted by Benjamini-Yekutieli method):
#> Intercept V1 V2 V3 V4 V5
#> Not significant 0 378 509 509 0 509
#> Significant (10% level) 0 21 0 0 0 0
#> Significant ( 5% level) 0 75 0 0 0 0
#> Significant ( 1% level) 509 35 0 0 509 0
#>
#> ----Variance parameters----------------------------------
#>
#> Spatial effects (coefficients on x):
#> (Intercept) V1 V2 V3 V4
#> random SD: Spatial 0.845 0.281 0.0755 0.000158 0.0294
#> Moran.I/max(Moran.I) 0.783 0.232 0.0909 0.446504 0.6594
#> V5
#> random SD: Spatial 0.0195
#> Moran.I/max(Moran.I) 0.7200
#>
#> ----Estimated probability distribution of y--------------
#> Estimates
#> skewness 0
#> excess kurtosis 0
#>
#> ----Error statistics-------------------------------------
#> stat
#> resid SE 5.224
#> adjR2(cond) 0.626
#> rlogLik -1666.739
#> AIC 3371.478
#> BIC 3451.894
#>
#> NULL model: lm( y ~ x )
#> (r)loglik: Inf ( AIC: -Inf, BIC: -Inf )
#>
#> Note: AIC and BIC are based on the restricted/marginal likelihood.
#> Use method="ml" for comparison of models with different fixed effects (x and xconst)head(resf_vc$b_vc)
#> (Intercept) V1 V2 V3 V4 V5
#> 1 34.5 0.553 0.00757 1.14e-04 -0.131 -0.0297
#> 2 34.5 0.705 0.02144 1.18e-04 -0.129 -0.0313
#> 3 34.5 0.365 -0.01972 9.61e-05 -0.136 -0.0297
#> 4 34.5 0.439 -0.00888 1.03e-04 -0.134 -0.0296
#> 5 34.5 0.714 0.01582 1.07e-04 -0.128 -0.0338
#> 6 34.5 0.512 0.01101 9.83e-05 -0.126 -0.0356